
Tags and keywords
This content has been marked as discussing an ADVANCED topic!
Now we'll see how this can be used to simulate acquisition of a pre-existing "actual" physical asset, corresponding to this case:
The following Activity Diagram can be used in Magic Model Analyst® (Cameo Simulation Toolkit®)
as the launcher:
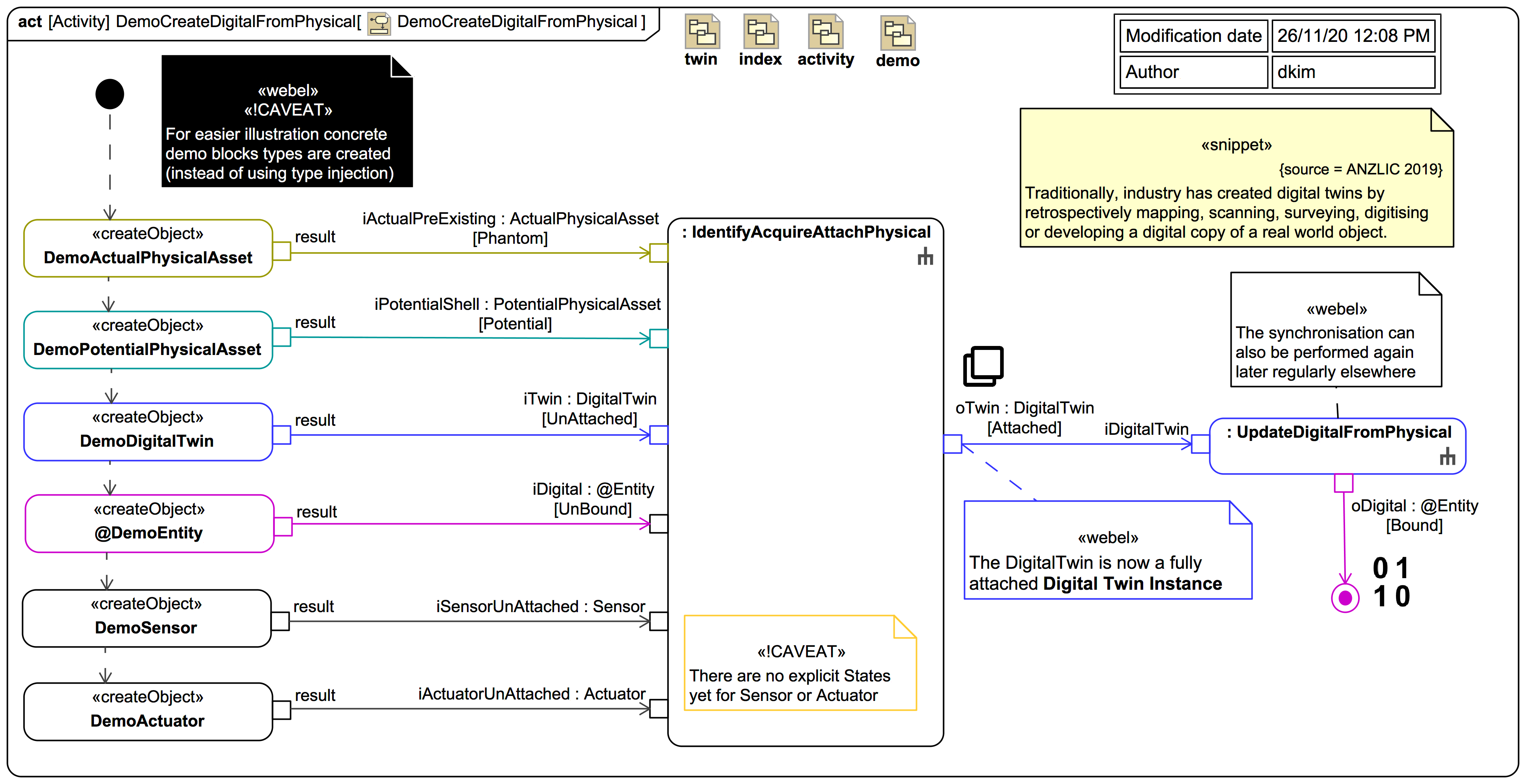
For easier illustration (and more traceable screencasting) various concrete demo types are created externally at the top-level (as opposed to injecting a family of types using the Abstract Factory pattern or similar).
Note the initial States of the various demo objects:
- The «physical»
DemoActualPhysicalAssetpre-exists in the real-world but in the terminology of the Webel Twin Pattern for SysML lifecycle it is still aPhantom. - The «digital»
DemoPotentialPhysicalAssetis merely a "shell" in thePotentialstate (it does not yet know which «physical»ActualPhysicalAssetit will track). - The «twin»
DemoDigitalTwinisUnattached. - The «digital»
@DemoEntityisUnBound(and does not yet digitally map the «physical»ActualPhysicalAssetas its «physical»PhysicalEntity). - The «sensor»
DemoSensorand «actuator»
DemoActuatorare also not yet attached (their states are not yet explicitly modelled in this trail, however you can imagine they still need to be connected up as part of the control loop to be managed by the «twin»DemoDigitalTwin).
If this is your first time working through these slide pages it is suggested that you please not watch the full length accompanying screencast video yet until the very end of this trail.
For experts
If you are particularly sharp, you might have noticed a «twin» DigitalTwin has to start off without a «digital» ![]()
@Entity or «twin» DigitalTwin assigned (at least for a while), which concern was slightly glossed over in the multiplicity indicators in some of the earlier diagrams, as explained in detail here: